1. Apa yang dimaksud supervised learning, unsupervised learning dan reinforcement learning?berikan contoh masing-masing?
Jawaban :
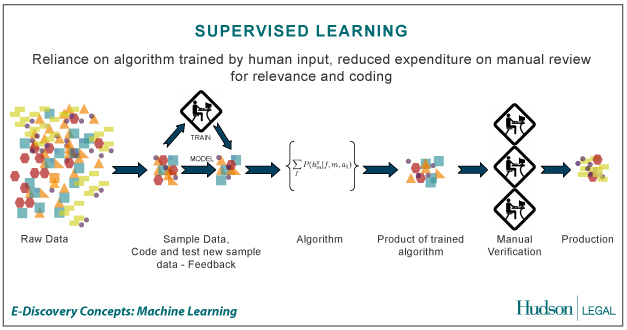
Supervised learning merupakan suatu pembelajaran yang terawasi dimana jika output yang diharapkan telah diketahui sebelumnya. Biasanya pembelajaran ini dilakukan dengan menggunakan data yang telah ada. Pada metode ini, setiap pola yang diberikan kedalam jaringan saraf tiruan telah diketahui outputnya. Satu pola input akan diberikan ke satu neuron pada lapisan input. Pola ini akan dirambatkan di sepanjang jaringan syaraf hingga sampai ke neuron pada lapisan output. Lapisan output ini akan membangkitkan pola output yang nantinya akan dicocokkan dengan pola output targetnya. Apabila terjadi perbedaan antara pola output hasil pembelajaran dengan pola output target, maka akan muncul error. Dan apabila nilai error ini masih cukup besar, itu berarti masih perlu dilakukan pembelajaran yang lebih lanjut.
Contoh algoritma jaringan saraf tiruan yang menggunakan metode supervised learning adalah :
– Hebbian (Hebb rule)
– Perceptron
– Adaline
– Boltzman
– Hapfield
– Backpropagation.
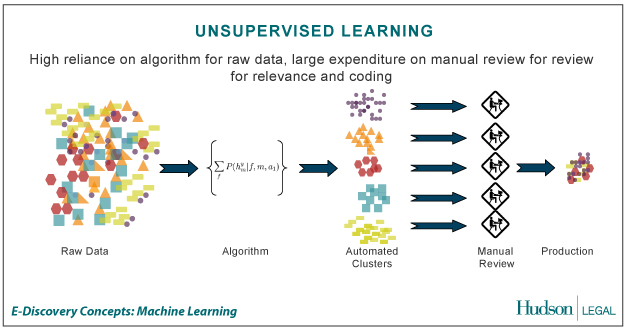
Unsupervised learning merupakan pembelajaran yang tidak terawasi yang tidak memerlukan target output. Pada metode ini tidak dapat ditentukan hasil seperti apa yang diharapkan selama proses pembelajaran. Nilai bobot yang disusun dalam proses range tertentu tergantung pada nilai output yang diberikan. Tujuan metode uinsupervised learning ini agar kita dapat mengelompokkan unit-unit yang hampir sama dalam satu area tertentu. Pembelajaran ini biasanya sangat cocok untuk klasifikasi pola.
Contoh algoritma jaringan saraf tiruan yang menggunakan metode unsupervised ini adalah :
– Competitive
– Hebbian
– Kohonen
– LVQ(Learning Vector Quantization)
– Neocognitron
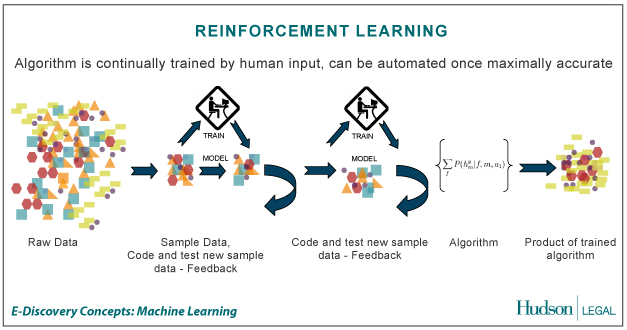
Reinforcement Learning adalah salah satu paradigma baru di dalam learning theory. RL dibangun dari proses mapping (pemetaan) dari situasi yang ada di environment (states) ke bentuk aksi (behavior) agar dapat memaksimalkan reward. Agent yang bertindak sebagai sang learner tidak perlu diberitahukan behavior apakah yang akan sepatutnya dilakukan, atau dengan kata lain, biarlah sang learner belajar sendiri dari pengalamannya. Ketika ia melakukan sesuatu yang benar berdasarkan rule yang kita
tentukan, ia akan mendapatkan reward, dan begitu juga sebaliknya.
RL secara umum terdiri dari 4 komponen dasar, yaitu :
1. Policy : kebijaksanaan
2. Reward function
3. Value function
4. Model of environment
Policy adalah fungsi untuk membuat keputusan dari agent yang menspesifikasikan tindakan apakah yang mungkin dilakukan dalam berbagai situasi yang ia jumpai. Policy inilah yang bertugas memetakan perceived states ke dalam bentuk aksi. Policy bisa berupa fungsi sederhana, atau lookup table. Policy ini merupakan inti dari RL yang sangat menentukan behavior dari suatu agent.
Reward function mendefinisikan tujuan dari kasus atau problem yang dihadapi. Ia mendefinisikan reward and punishment yang diterima agent saat ia berinteraksi dengan environment. Tujuan utama dari rewar d function ini adalah memaksimalkan total reward pada kurun waktu tertentu setelah agent itu berinteraksi.
Value function menspesifikasikan fungsi akumulasi dari total reward yang didapatkan oleh agent. Jika reward function berbicara pada masing-masing partial time dari proses interaksi, value function berbicara pada long-term dari proses interaksi.
Model of environment adalah sesuatu yang menggambarkan behavior dari environment. Model of environment ini sangat berguna untuk mendesain dan merencanakan behavior yang tepat pada situasi mendatang yang memungkinkan sebelum agent sendiri mempunyai pengalaman dengan situasi itu. Saat masa-masa awal RL dikembangkan, model of environment yang ada berupa trial and error. Namun modern RL sekarang sudah mulai menjajaki spektrum dari low -level, trial and error menuju high-level,
deliberative planning.
2. Apa yang dimaksud dengan Learning Decision Tree dan berikan contohnya?
Learning Decision Tree adalah salah satu metode belajar yang sangat populer dan banyak digunakan secara praktis. Metode ini merupakan metode yang berusaha menemukan fungsi-fungsi pendekatan yang bernilai diskrit dan tahan terhadap data-data yang terdapat kesalahan (noisy data) serta mampu mempelajari ekspresi-ekspresi disjunctive (ekspresi OR). Iterative Dychotomizer version 3 (ID3) adalah salah satu jenis Decision tree yang sangat populer.
Konsep Decision Tree adalah mengubah data menjadi pohon keputusan (decision tree) dan aturan-aturan keputusan (rule).
DATA >> DECISION TREE >> RULE
Decision tree adalah struktur flowcart yang mempunyai tree(pohon), dimana setiap simpul internal menandakan suatu tes atribut,setiap cabang merepresentasikan hasil tes, dan simpul daun merepresentasikan kelas atau distribusi kelas. Alur pada decision tree ditelusuri dari simpul ke akar ke simpul daun yang memegang prediksi kelas untuk contoh tersebut. Decision tree mudah untuk dikonversi ke aturan klasifikasi (classification rule). Konsep data dalam decision tree dinyatakan dalam bentuk tabel dengan atribut dan record.
Contoh :
1. DATA SAMPLE
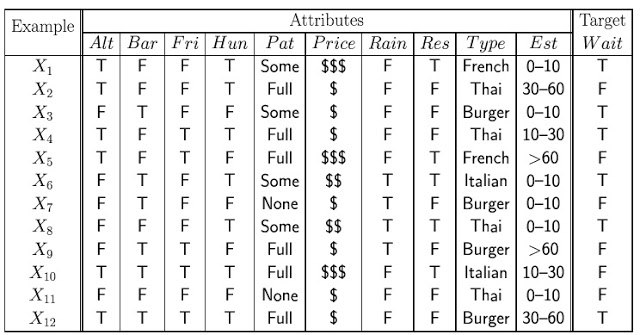
Ada 10 variabel yang digunakan untuk dasar mengambil keputusan. Kelas keputusan ada dua yaitu Menunggu/Tidak di sebuah restoran
Alt : Alternate ;
Bar : ada bar atau tidak ;
Fri : Weekend ;
Hun : Hungry ;
Pat: pengunjung ;
Price : harga ;
Rain;
Res : Reservation ;
Type : tipe restoran ;
Est : estimated time
2. DECISION TREE RESULT
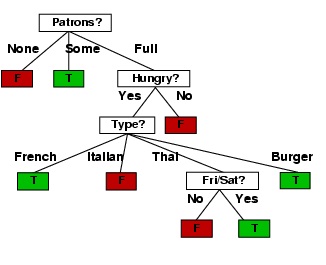
Kotak yang diarsir adalah daun . Kotak tanpa arsiran adalah akar atau cabang . Pola untuk mengubah menjadi RULE adalah :
1) Akar/Cabang adalah proposisi pembentuk frase IF
2) Daun adalah proposisi pembentuk Frase THEN
Contoh :
1) IF Patron = None THEN Wait = False
2) IF Patron = Full and Hungry = Yes and Type = French Then wait = true
3) IF Patron = Full and Hungry = Yes and Type = Thai and Fri/Sat = yes Then wait = true
dst.